Занятия робототехникой и техническим творчеством развивают, дают новые знания и помогают в учебе. Еще одна причина, по которой детей не оторвать от роботов — возможность соревноваться. Приведем пример самых крупных международных соревнований роботов для детей:
Основные задания для соревновании:
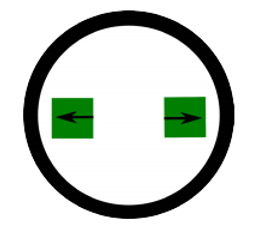
Соревнования Сумо являются одними из самых зрелищных и захватывающих видов состязания роботов. Задача заключается в том, чтобы робот должен столкнуть робота-противника с поля.
Состязания Сумо проводятся на всех уровнях (районные, городские, региональные, международные). Правила регламентируют цвет поля (белое поле с черной границей или черное поле с белой границей), диаметр поля, размеры и допустимый вес роботов.
Регламент состязаний следующий (рис. 15.1):
Рисунок 15.1 – Соревнования роботов
Поле для состязаний представляет собой круг диаметром 122 см белого цвета, окантованный 4-х сантиметровой чёрной полосой. Максимальная ширина и длина робота ограничена 30,48 сантиметрами (1 фут). Масса робота не может превышать 0,907 кг (2 фунта). Высота поля около 5 см. Робот считается проигравшим, если он вышел с поля. Бой состоит из трех раундов. Длительность каждого раунда — одна – две минуты.
Участники соревнований выбирают разную тактику: кто-то предпочитает создавать больших по габаритам и небыстрых, но мощных (за счет понижения передачи с помощью шестеренок) роботов, другие, наоборот, разрабатывают небольших, но быстрых роботов, способных маневрировать и, за счет этого, выталкивать робота противника с поля, успевая оказаться сбоку от него.
Поскольку бой состоит из трех раундов, то, в зависимости от робота противника, можно предварительно создать несколько вариантов программ и выбирать тактику поединка. Например, если перед нами мощный, но медленный робот, можно запустить программу, по которой робот будет атаковать соперника быстро и сбоку; если робот соперника, в поисках нашего робота, всегда поворачивается направо, нужно запускать программу, объезжающую и атакующую его слева. Особенно интересными получаются раунды, в которых соревнуются примерно равные по силе или скорости роботы, в этом случае исход решают миллиметры и секунды!
Победителем становится тот участник, который смог собрать крепкую и надежную конструкцию, написал грамотную программу (или программы) и выбрал правильную стратегию. Именно сочетание этих факторов делают процесс подготовки к состязаниям увлекательным, а сами соревнования очень зрелищными и захватывающими!
Кегельринг
Перед началом состязания на поле расставляют 8 кегель(рис.15.2)
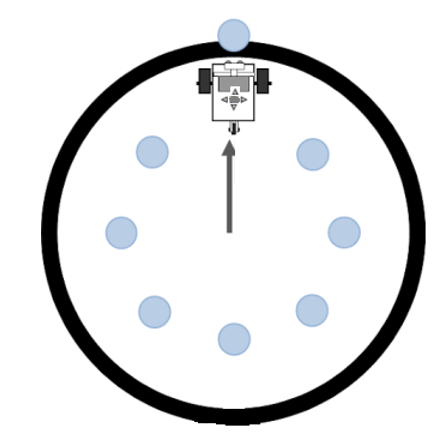
Рисунок 15.2 – Кегельринг
Робот ставится в центр поля. Задача заключается в том, чтобы за наиболее короткое время робот вытолкнул кегли с поля. Обычно время попытки ограничивается двумя минутами.
Диаметр поля чаще всего составляет 1м, ширина ограничительной линии – 50мм. Кегли могут быть изготовлены из пустых стандартных жестяных банок, используемых для напитков.
Ограничения ширины и длины робота – 25 см. Необходимо оговорить, что робот должен выталкивать кегли только своим корпусом без применения манипуляторов.
После того, как робот полностью вытолкнет с поля кеглю, участнику допускается ее убрать, поскольку датчик ультразвука может реагировать на уже вытолкнутые кегли.
Результат определяется по времени, если вытолкнуты все кегли, или по количеству вытолкнутых кеглей, если задание выполнено частично.
Существует вариант соревнований Кегельринг-макро. В этом случае половина кеглей черного цвета, половина – белого. Задача состоит в том, чтобы вытолкнуть все кегли белого цвета, а кегли черного цвета оставить на поле. За вытолкнутые черные кегли назначаются штрафные очки.
Слалом (объезд препятствий)
Объезд различных препятствий является заданием, которое часто встречается на различных соревнованиях. Рассмотрим задачу: на линии находится препятствие (банка, стакан и тд.), которое необходимо объехать. Обнаружить препятствие можно ультразвуковых или инфракрасным датчиком, расположенным спереди робота. На рис.15.3 представлена траектория, по которой робот объезжает препятствие после его обнаружения.
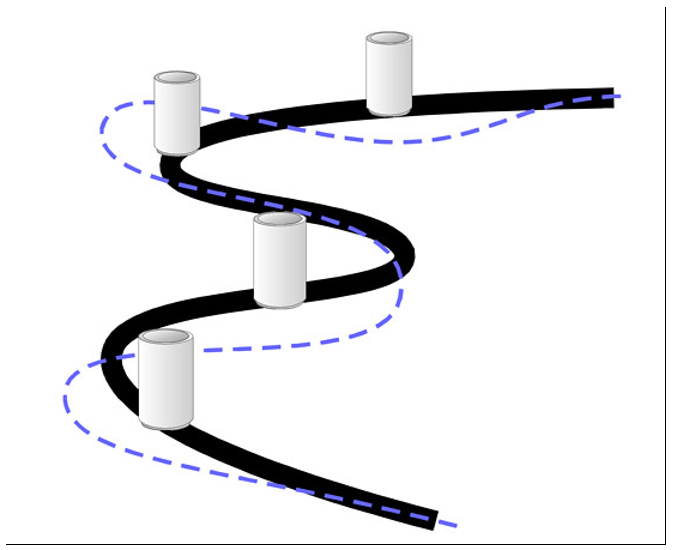
Рисунок 15.3 - Слалом - объезд препятствий
Вопросы
Практическая работа №15
Цель: Программирования робота по требованиям соревнований
Соревнования Сумо является одним из самых зрелищных и захватывающих видов состязаний роботов. Задача заключается в том, чтобы робот столкнул робота – противника с поля.

Рисунок 15.1 – Соревнования роботов
Регламент состязаний следующий:
Правила регламентируют цвет поля (белое поле с черной границей или черное поле с белой границей), диаметр поля, размеры и допустимый вес роботов.
В состязаниях Сумо поле представляет собой круг диаметром 122 см белого цвета, окантованный черной полосой. Максимальная ширина и длина робота ограничена 30,48 см (1 фут). Масса робота не может превышать 0,907 кг (2 фута). Высота поля около 5 см.
В состязаниях Мини-сумо поле представляет собой круг диаметром 90 см черного цвета, окантованный белой полосой. Максимальная ширина и длина робота ограничена 15 см. Масса робота не может превышать 1 кг.
Робот считается проигравшим, если он упал с поля. Бой состоит из трех раундов. Длительность каждого раунда – одна-две минуты.
Победителем становится тот участник, который смог собрать крепкую и надежную конструкцию, написал грамотную программу и выбрал правильную стратегию.
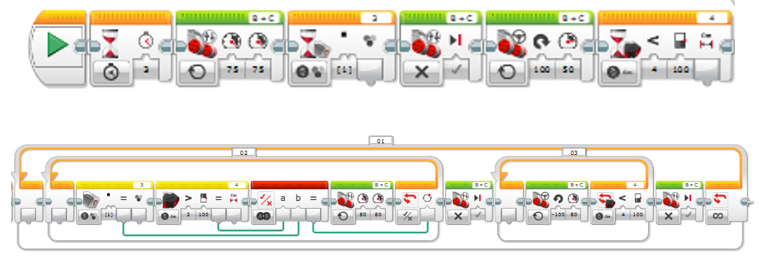
Приведем пример алгоритма программы для робота сумоиста.
Переходим к пункту 5.
Кегельринг
Рассмотрим один из вариантов траектории выталкивания банок из круга. Этот вариант возможен в том случае, когда банки установлены строго напротив друг друга. Конструкция предполагает установку датчиков цвета для обнаружения черной линии спереди и позади робота.
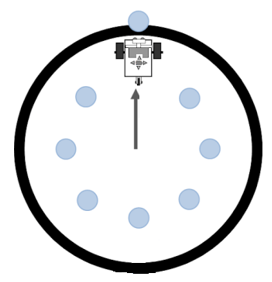
Рисунок 15.2 – Кегельринг
По данному алгоритму робот движется из центра по направлению к банке до черной линии и выталкивает ее, затем движется в противоположном направлении до черной линии и выталкивает банку позади себя, возвращается в центр, поворачивается по направлению к следующей банке и т.д.
Программа решения задачи

Задания для самостоятельной работы
Задание 1. Слалом (объезд препятствий) написать программу.